9.5 KiB
Executable File
解题思路:
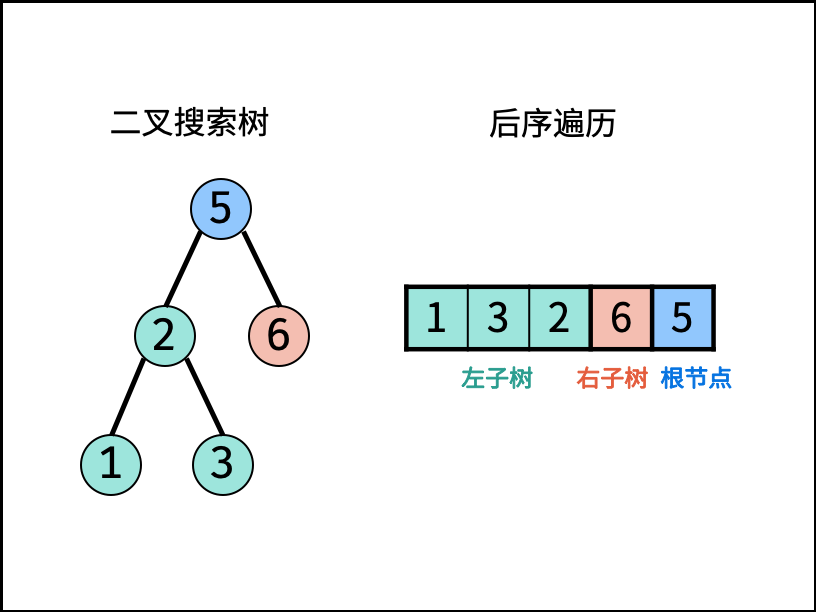
后序遍历定义: [ 左子树 | 右子树 | 根节点 ] ,即遍历顺序为 “左、右、根” 。
二叉搜索树定义: 左子树中所有节点的值 < 根节点的值;右子树中所有节点的值 > 根节点的值;其左、右子树也分别为二叉搜索树。
 {:align=center width=500}
{:align=center width=500}
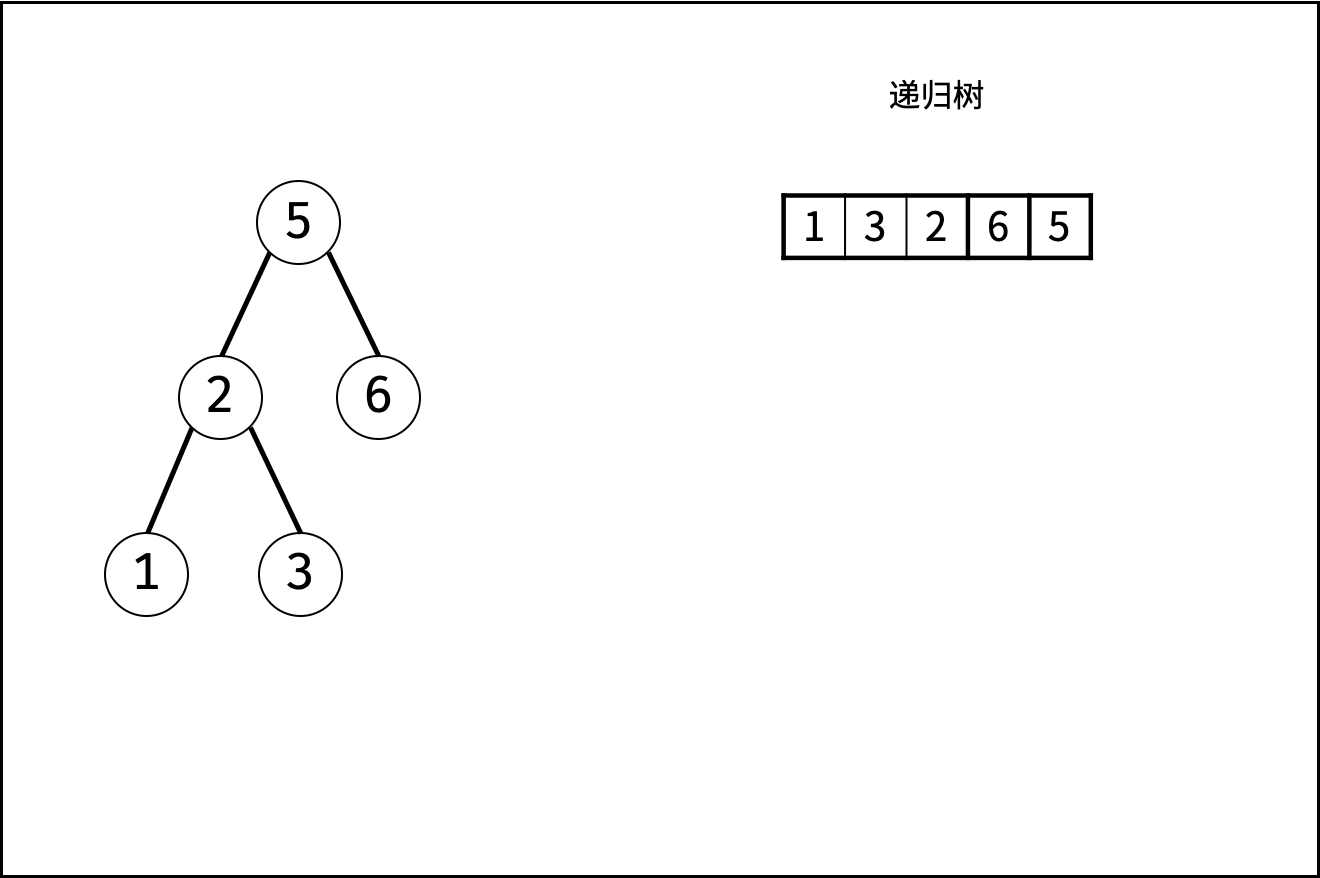
方法一:递归分治
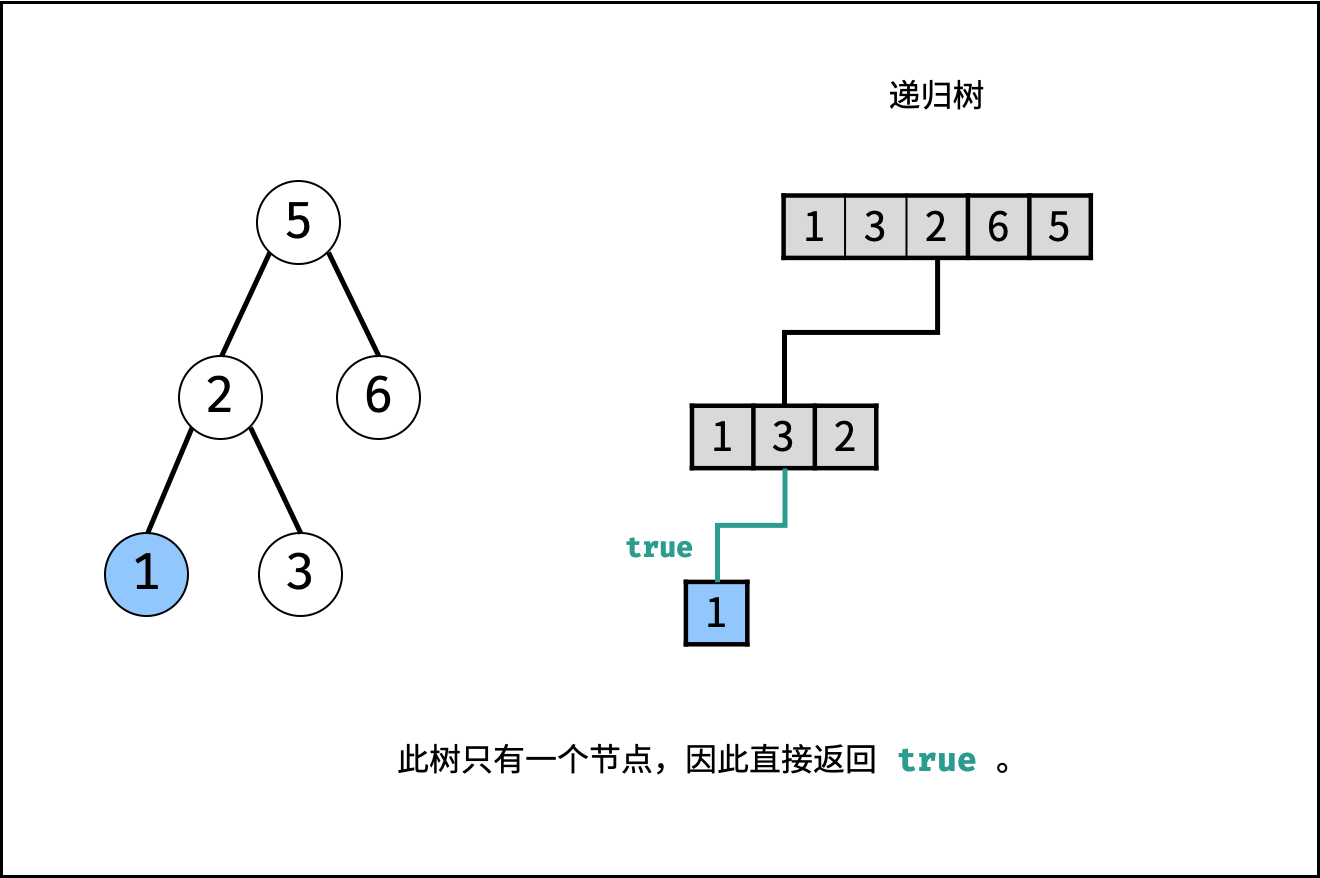
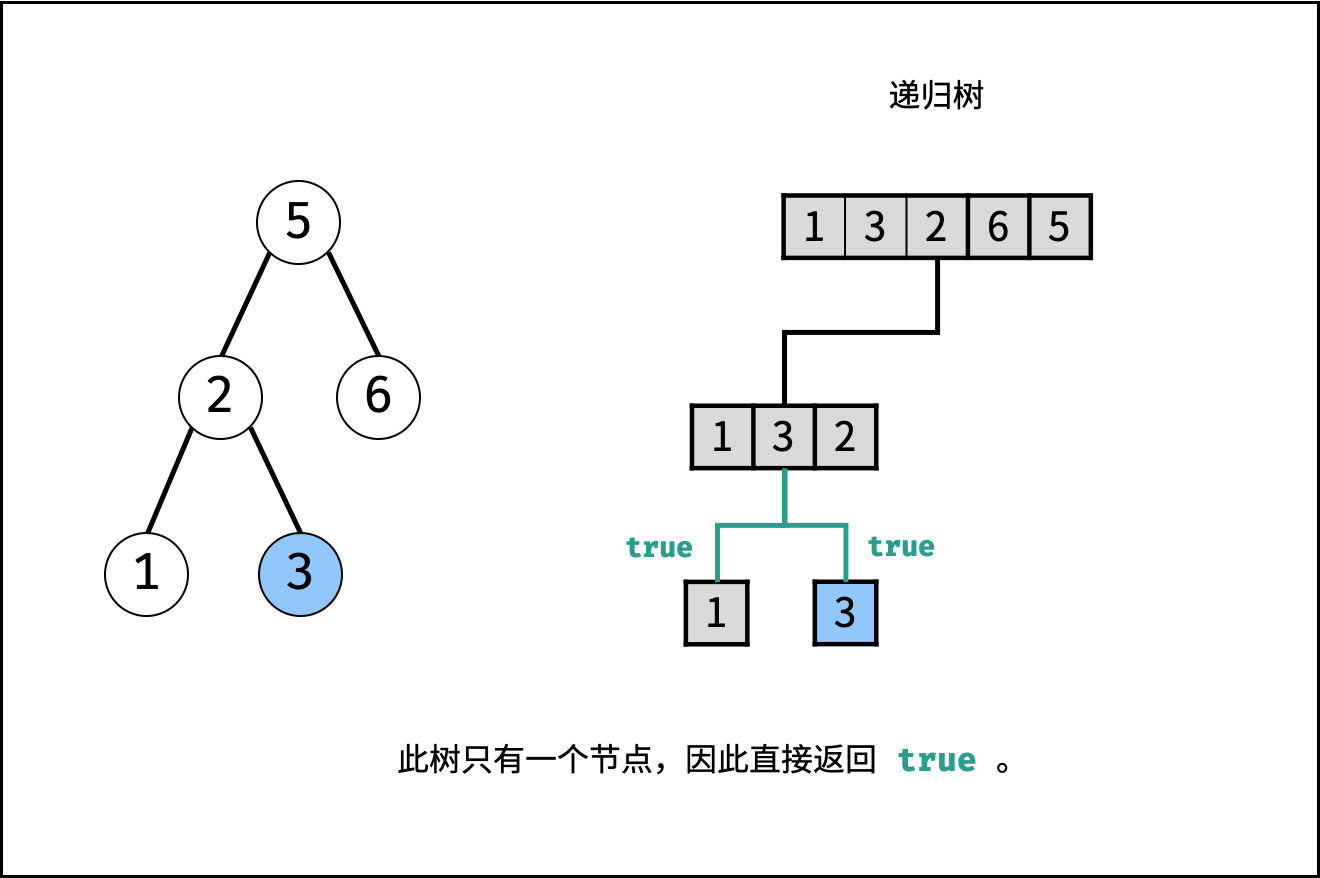
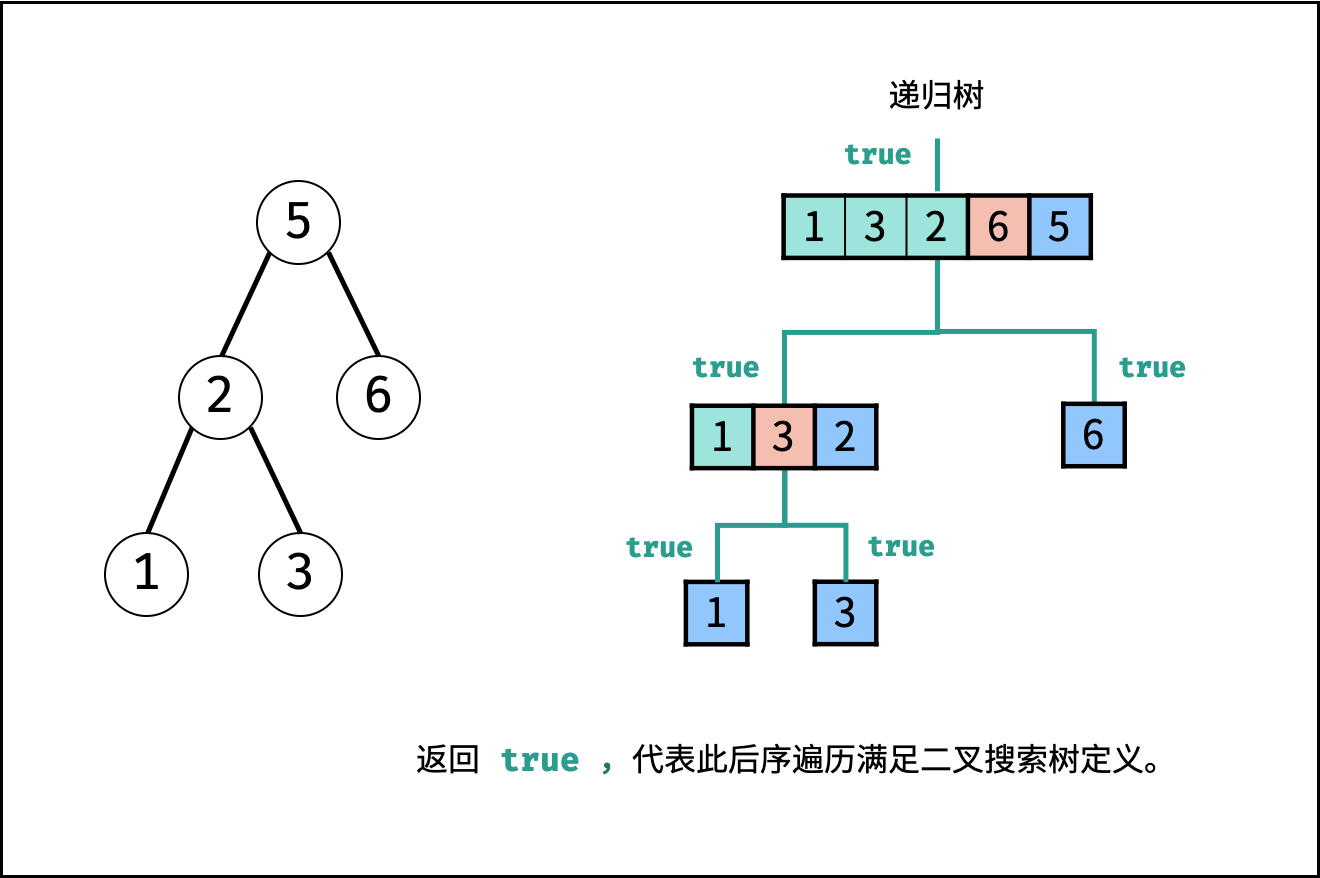
根据二叉搜索树的定义,可以通过递归,判断所有子树的 正确性 (即其后序遍历是否满足二叉搜索树的定义) ,若所有子树都正确,则此序列为二叉搜索树的后序遍历。
递归解析:
终止条件: 当 i \geq j ,说明此子树节点数量 \leq 1 ,无需判别正确性,因此直接返回 \text{true} ;
递推工作:
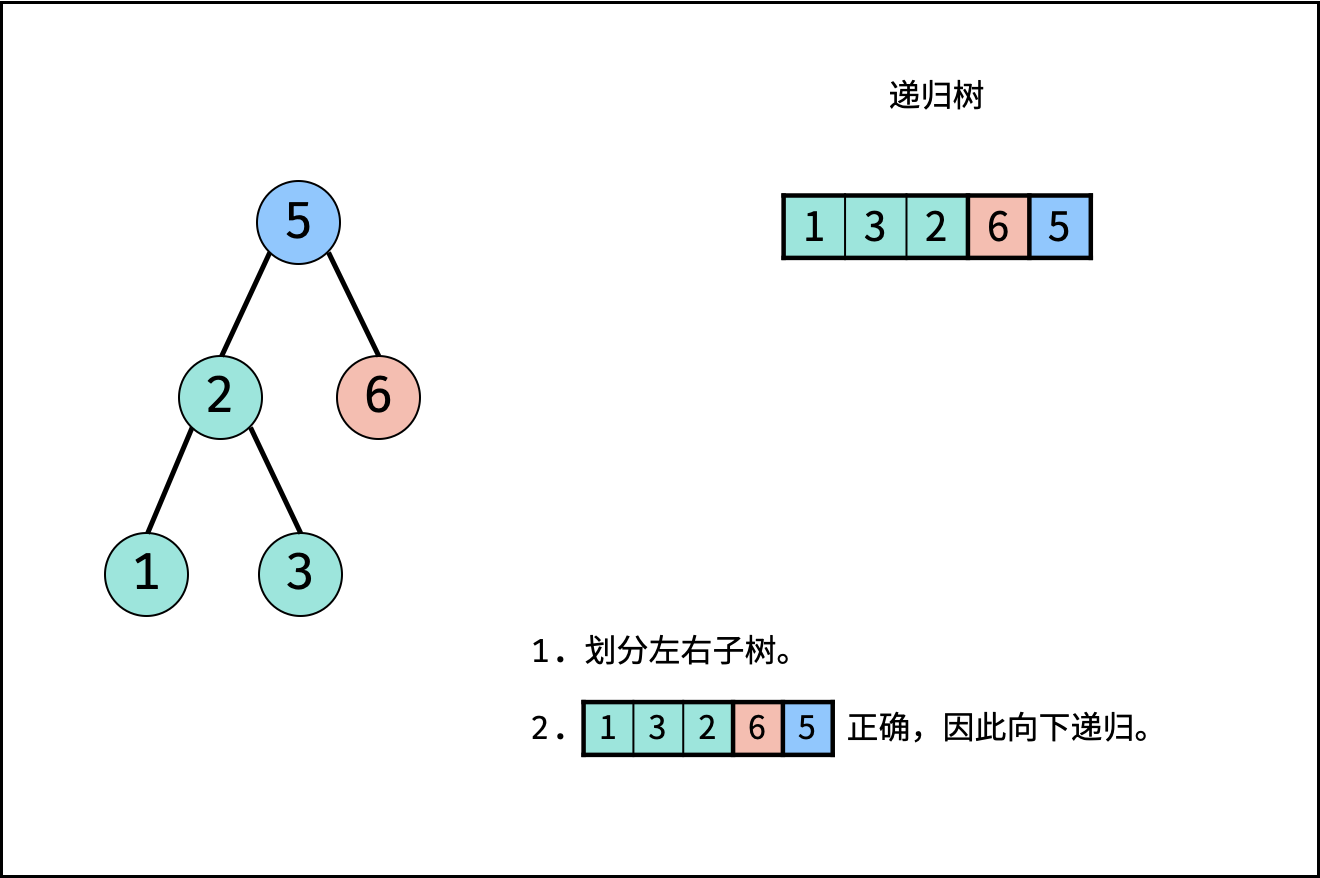
- 划分左右子树: 遍历后序遍历的
[i, j]区间元素,寻找 第一个大于根节点 的节点,索引记为m。此时,可划分出左子树区间[i,m-1]、右子树区间[m, j - 1]、根节点索引j。 - 判断是否为二叉搜索树:
- 左子树区间
[i, m - 1]内的所有节点都应<postorder[j]。而第1.划分左右子树步骤已经保证左子树区间的正确性,因此只需要判断右子树区间即可。 - 右子树区间
[m, j-1]内的所有节点都应>postorder[j]。实现方式为遍历,当遇到\leq postorder[j]的节点则跳出;则可通过p = j判断是否为二叉搜索树。
- 左子树区间
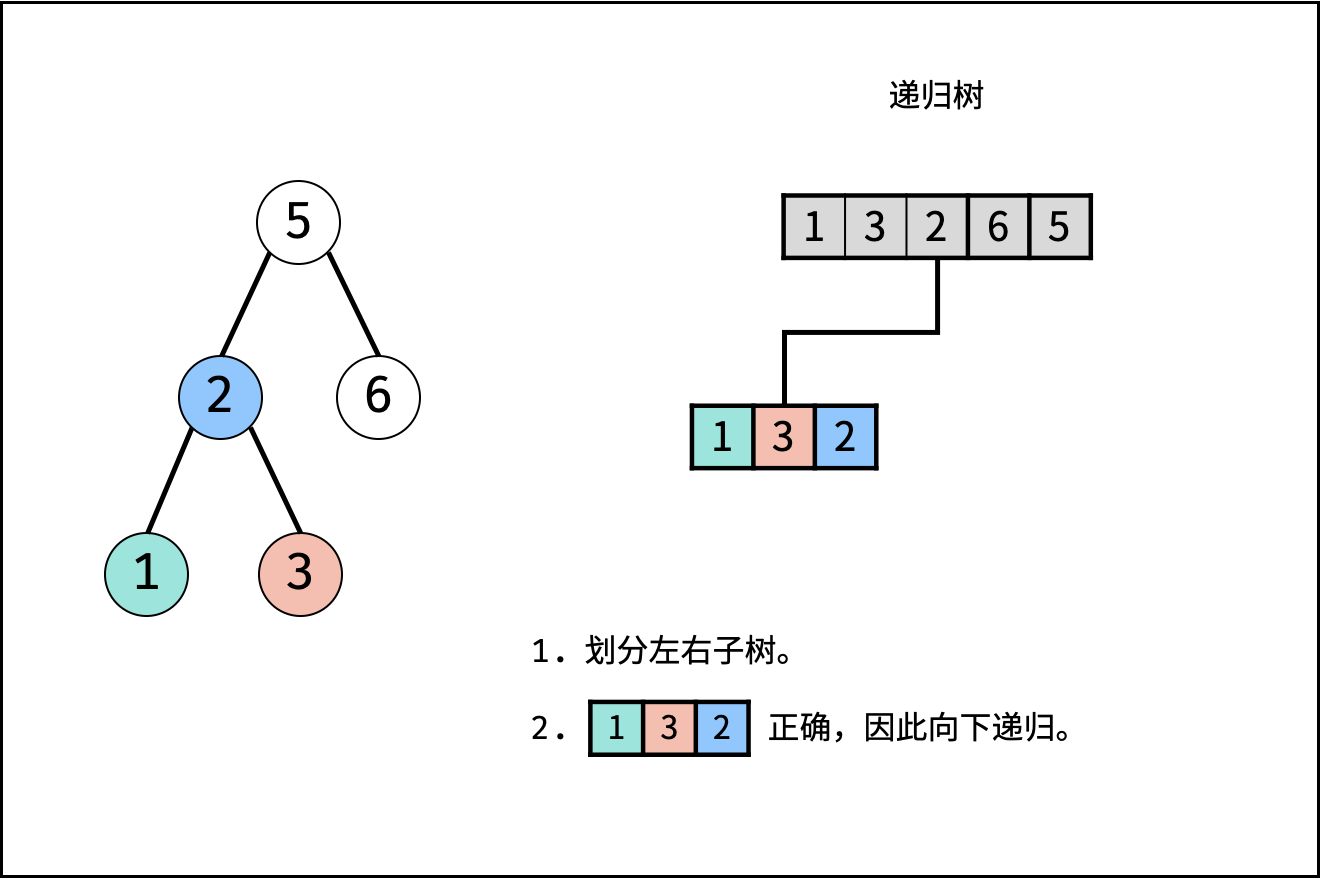
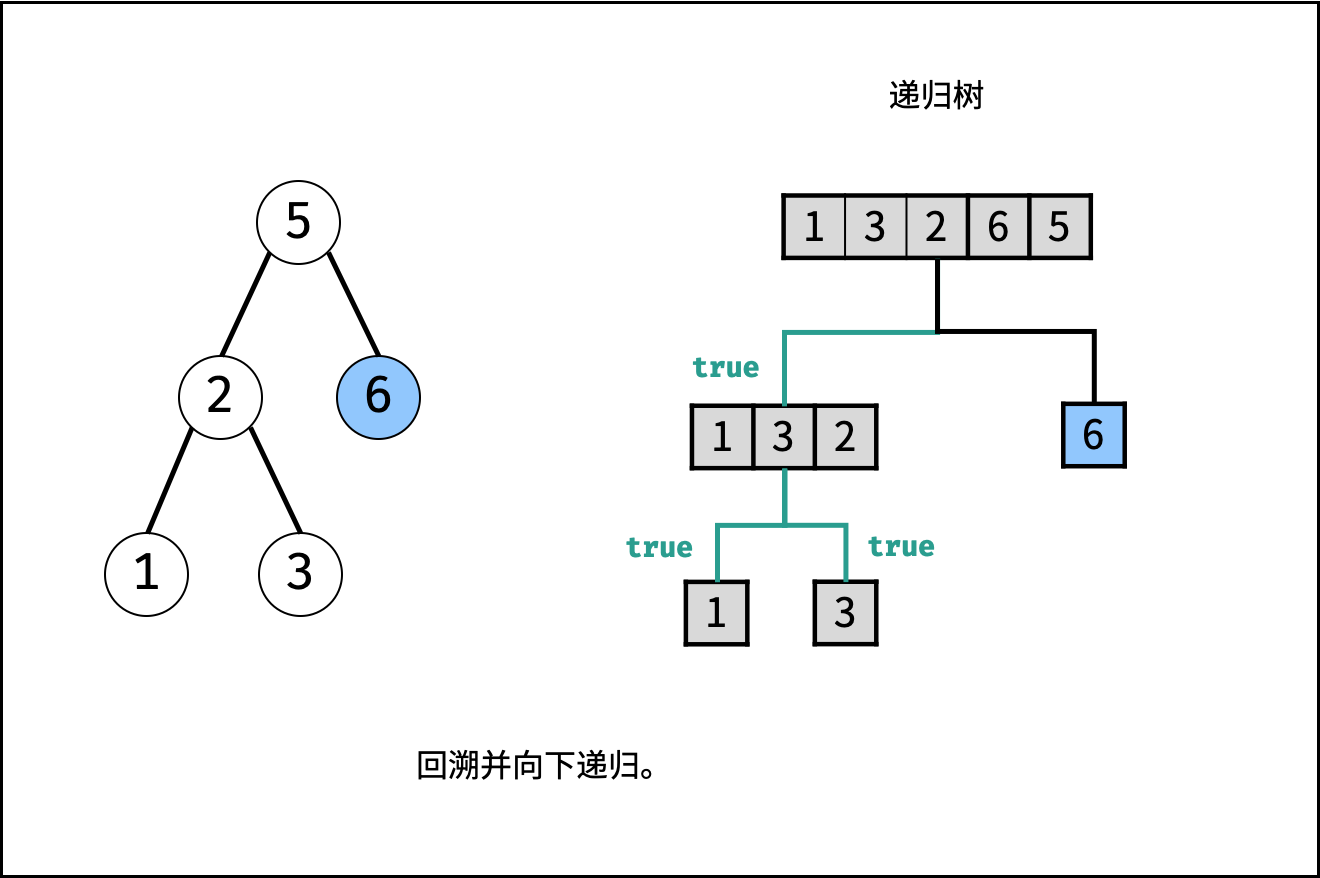
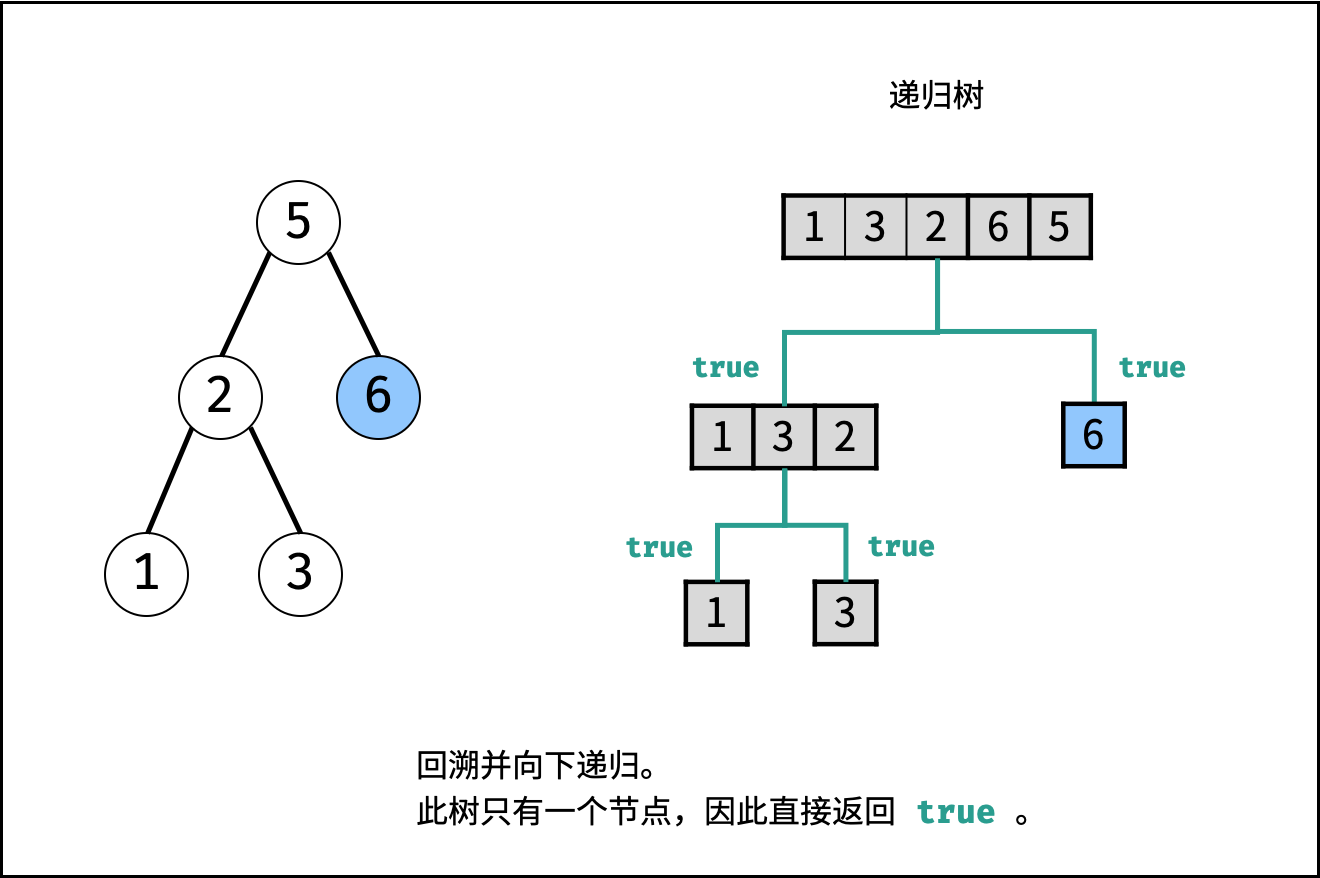
返回值: 所有子树都需正确才可判定正确,因此使用 与逻辑符 \&\& 连接。
p = j: 判断 此树 是否正确。recur(i, m - 1): 判断 此树的左子树 是否正确。recur(m, j - 1): 判断 此树的右子树 是否正确。
< ,
, ,
, ,
, ,
, ,
, ,
, ,
, >
>
代码:
class Solution:
def verifyTreeOrder(self, postorder: List[int]) -> bool:
def recur(i, j):
if i >= j: return True
p = i
while postorder[p] < postorder[j]: p += 1
m = p
while postorder[p] > postorder[j]: p += 1
return p == j and recur(i, m - 1) and recur(m, j - 1)
return recur(0, len(postorder) - 1)
class Solution {
public boolean verifyTreeOrder(int[] postorder) {
return recur(postorder, 0, postorder.length - 1);
}
boolean recur(int[] postorder, int i, int j) {
if(i >= j) return true;
int p = i;
while(postorder[p] < postorder[j]) p++;
int m = p;
while(postorder[p] > postorder[j]) p++;
return p == j && recur(postorder, i, m - 1) && recur(postorder, m, j - 1);
}
}
class Solution {
public:
bool verifyTreeOrder(vector<int>& postorder) {
return recur(postorder, 0, postorder.size() - 1);
}
private:
bool recur(vector<int>& postorder, int i, int j) {
if(i >= j) return true;
int p = i;
while(postorder[p] < postorder[j]) p++;
int m = p;
while(postorder[p] > postorder[j]) p++;
return p == j && recur(postorder, i, m - 1) && recur(postorder, m, j - 1);
}
};
复杂度分析:
- 时间复杂度
O(N^2): 每次调用recur(i,j)减去一个根节点,因此递归占用O(N);最差情况下(即当树退化为链表),每轮递归都需遍历树所有节点,占用O(N)。 - 空间复杂度
O(N): 最差情况下(即当树退化为链表),递归深度将达到N。
方法二:辅助单调栈
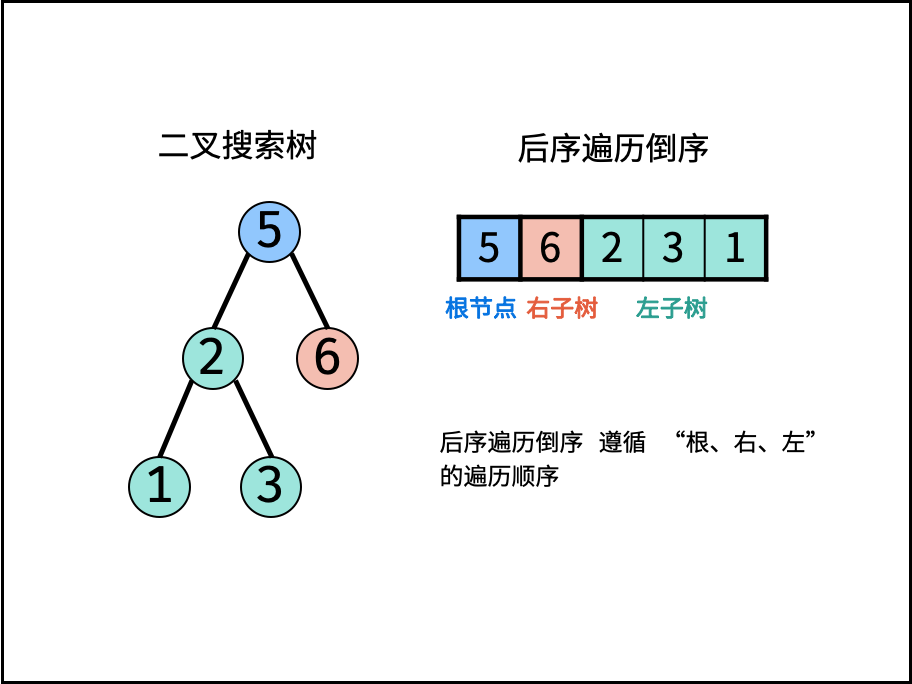
后序遍历倒序: [ 根节点 | 右子树 | 左子树 ] 。类似 先序遍历的镜像 ,即先序遍历为 “根、左、右” 的顺序,而后序遍历的倒序为 “根、右、左” 顺序。
 {:align=center width=500}
{:align=center width=500}
设后序遍历倒序列表为 $[r_{n}, r_{n-1},...,r_1]$,遍历此列表,设索引为 i ,若为 二叉搜索树 ,则有:
- 当节点值
r_i > r_{i+1}时: 节点r_i一定是节点r_{i+1}的右子节点。 - 当节点值
r_i < r_{i+1}时: 节点r_i一定是某节点root的左子节点,且root为节点r_{i+1}, r_{i+2},..., r_{n}中值大于且最接近r_i的节点(∵root直接连接 左子节点r_i)。
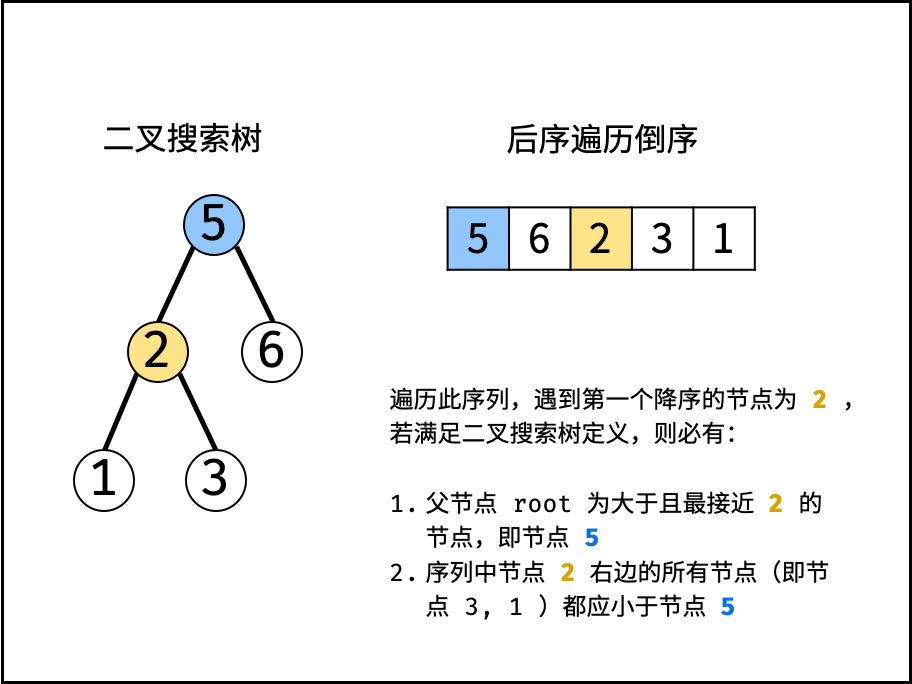
当遍历时遇到递减节点 r_i < r_{i+1} ,若为二叉搜索树,则对于后序遍历中节点 r_i 右边的任意节点 r_x \in [r_{i-1}, r_{i-2}, ..., r_1] ,必有节点值 r_x < root 。
节点
r_x只可能为以下两种情况:(1)r_x为r_i的左、右子树的各节点;(2)r_x为root的父节点或更高层父节点的左子树的各节点。在二叉搜索树中,以上节点都应小于root。
 {:align=center width=500}
{:align=center width=500}
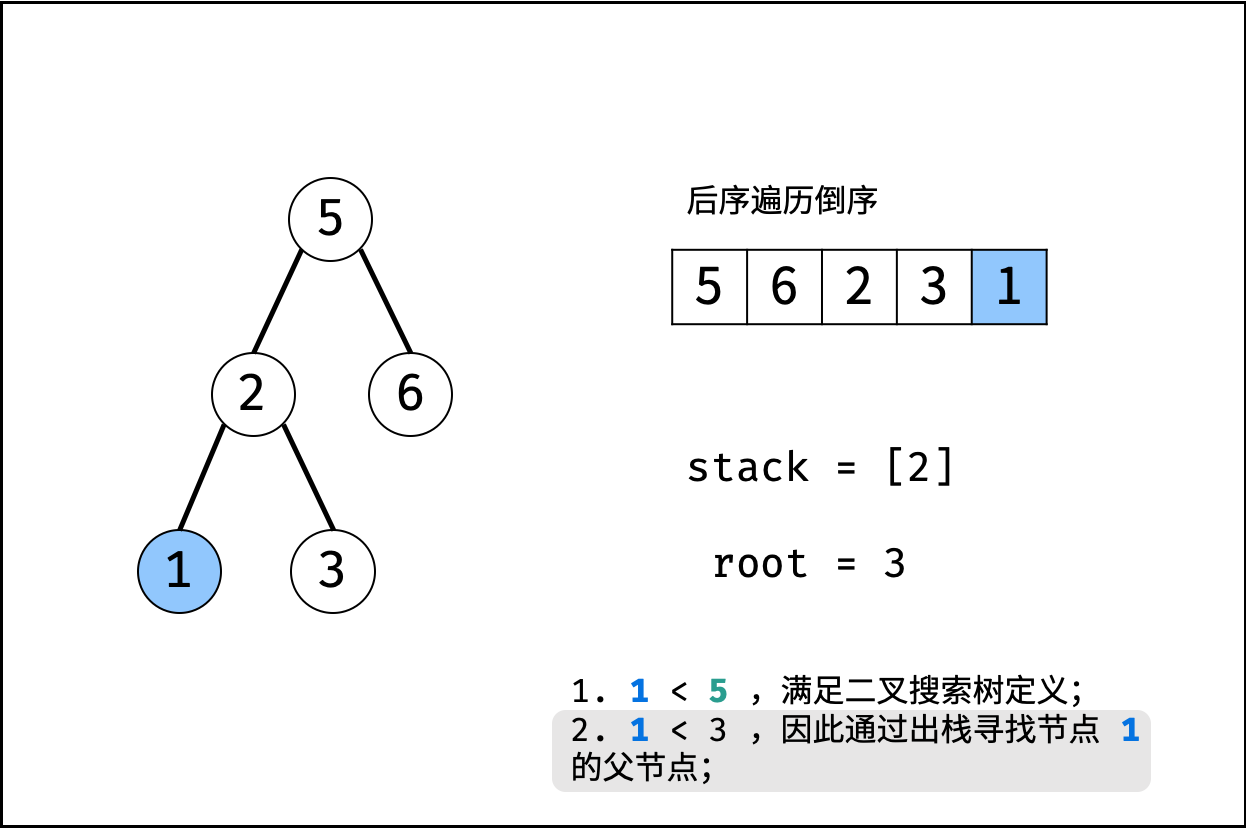
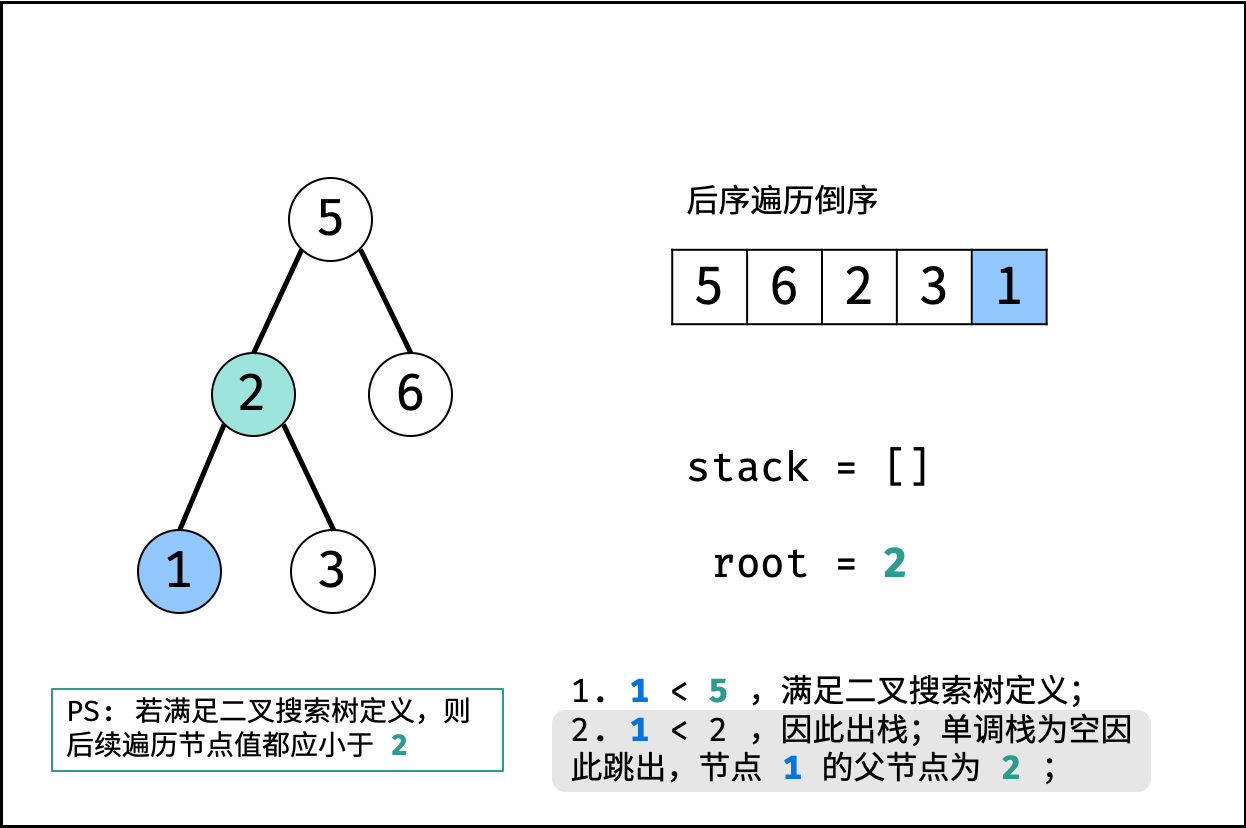
遍历 “后序遍历的倒序” 会多次遇到递减节点 r_i ,若所有的递减节点 r_i 对应的父节点 root 都满足以上条件,则可判定为二叉搜索树。根据以上特点,考虑借助 单调栈 实现:
- 借助一个单调栈
stack存储值递增的节点; - 每当遇到值递减的节点
r_i,则通过出栈来更新节点r_i的父节点root; - 每轮判断
r_i和root的值关系:- 若
r_i > root则说明不满足二叉搜索树定义,直接返回\text{false}。 - 若
r_i < root则说明满足二叉搜索树定义,则继续遍历。
- 若
算法流程:
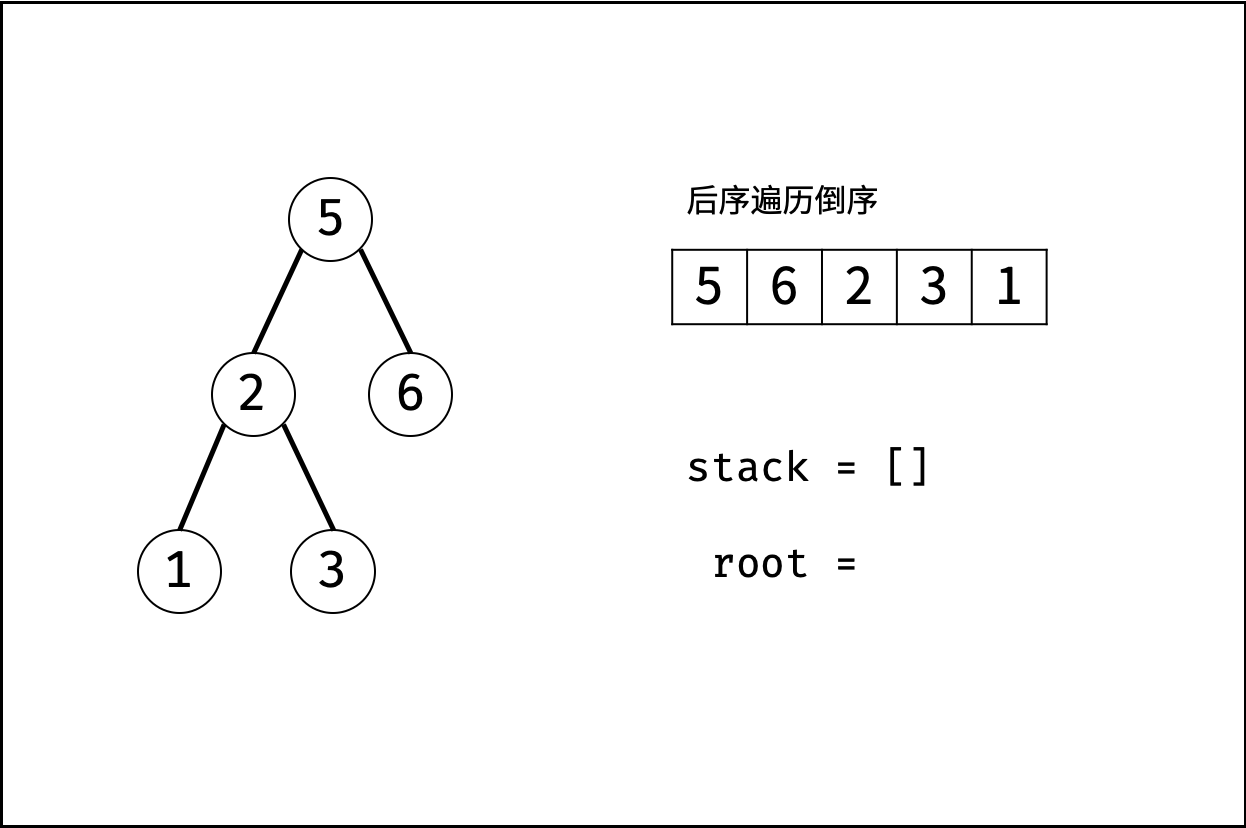
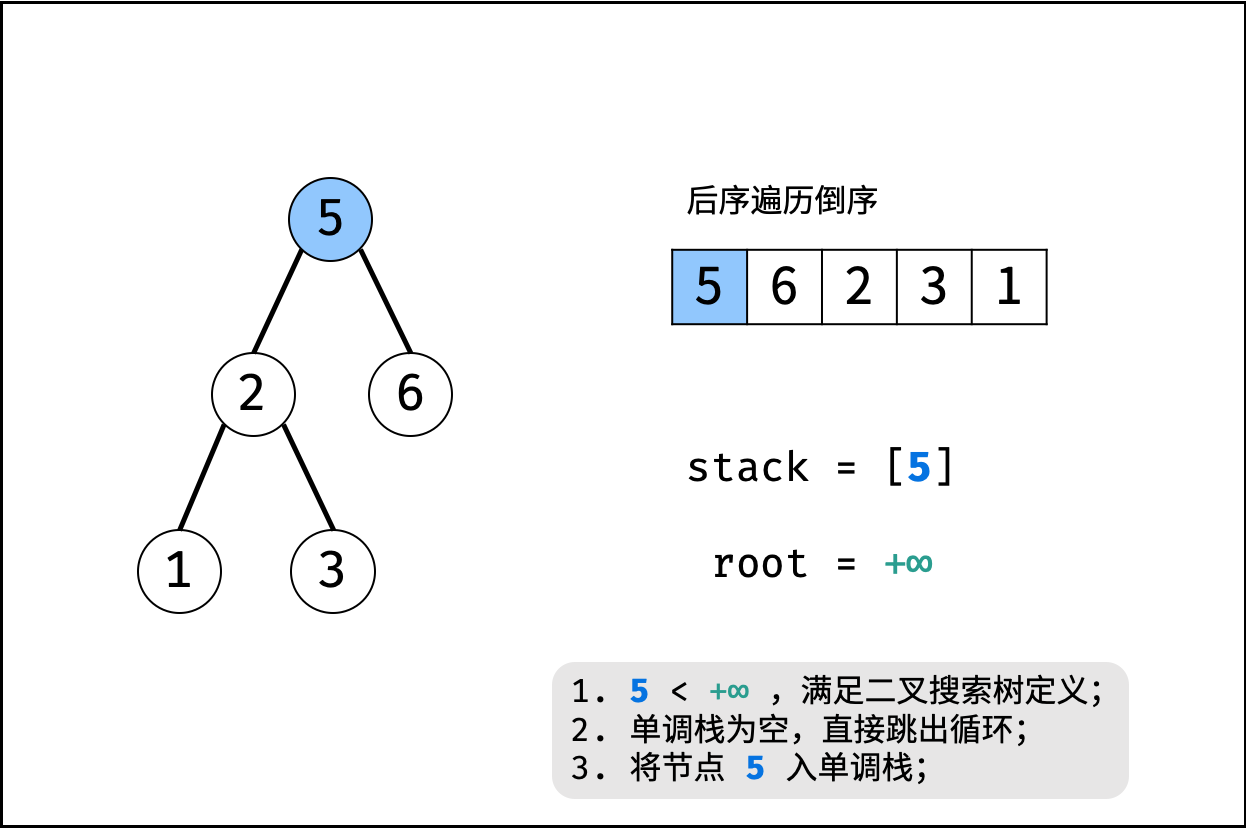
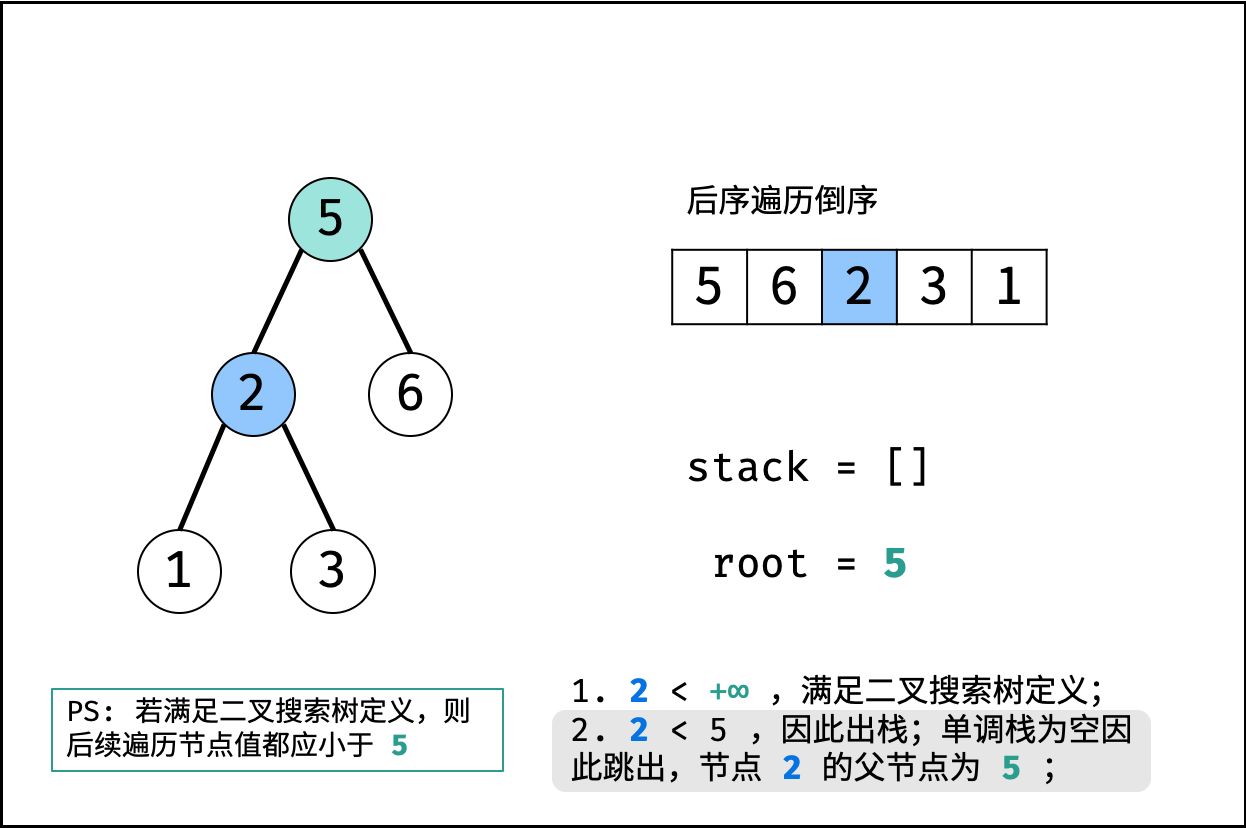
- 初始化: 单调栈
stack,父节点值root = +\infin(初始值为正无穷大,可把树的根节点看为此无穷大节点的左孩子); - 倒序遍历 $postorder$ :记每个节点为 $r_i$;
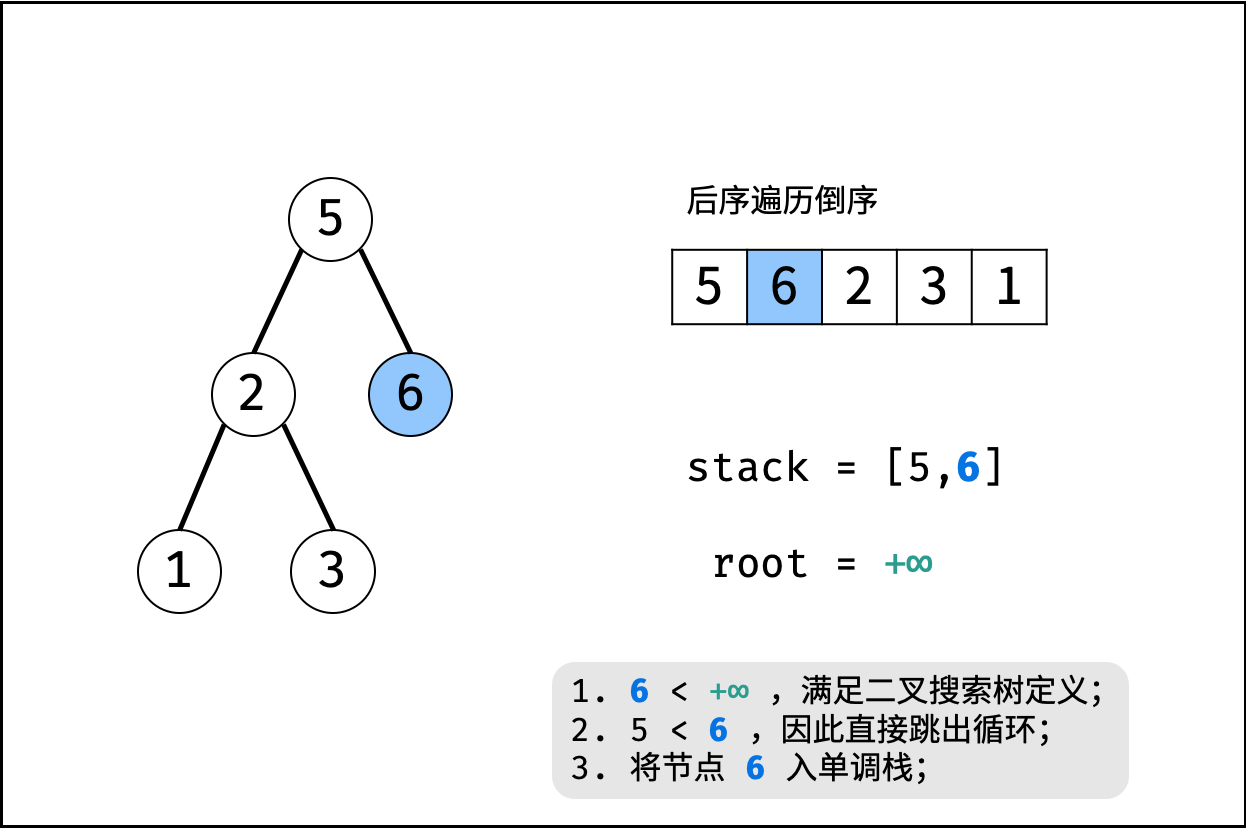
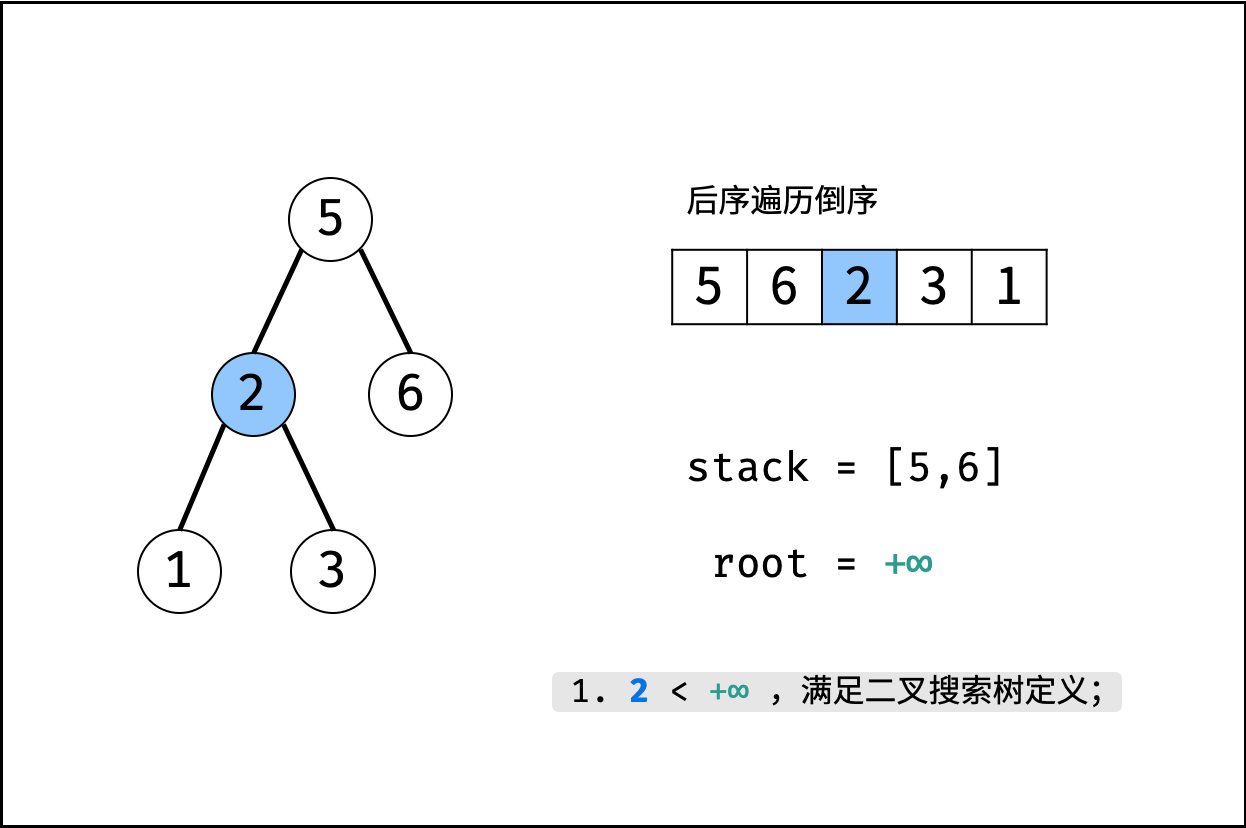
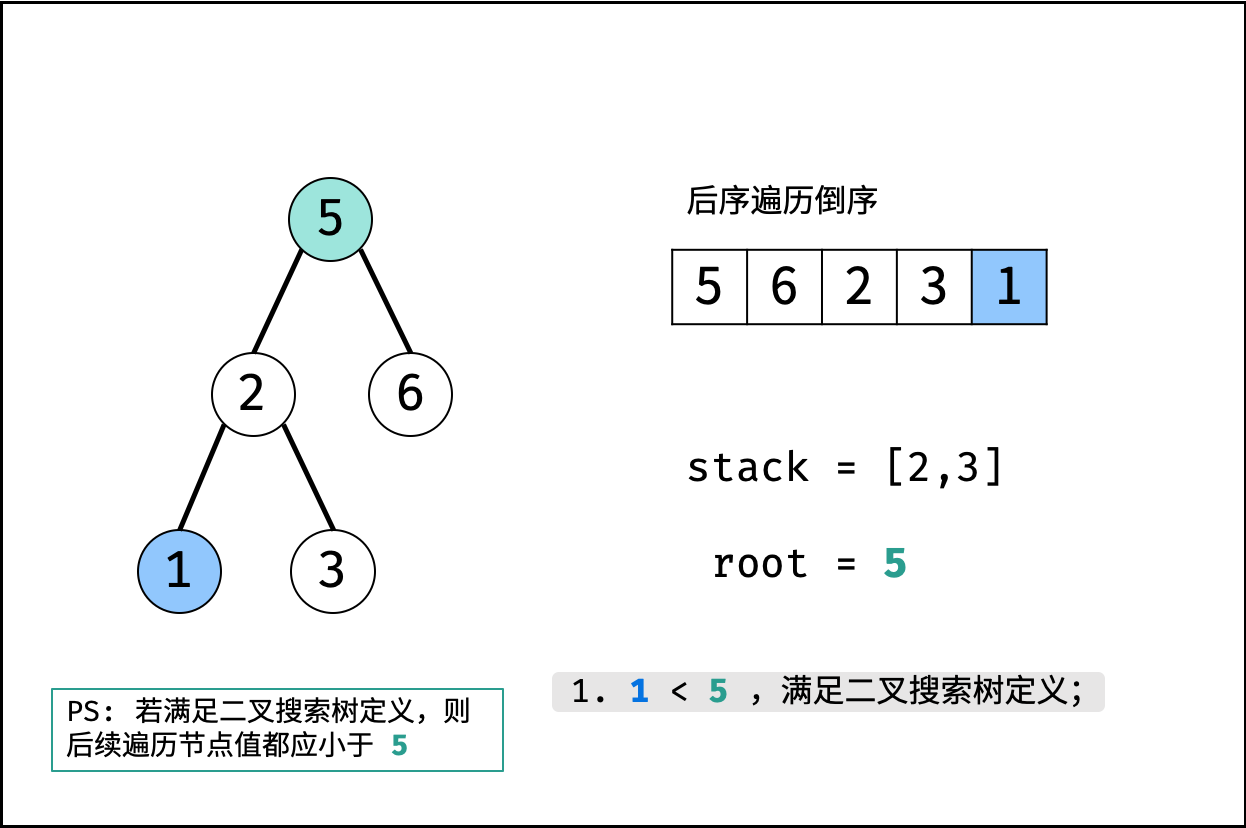
- 判断: 若
r_i>root,说明此后序遍历序列不满足二叉搜索树定义,直接返回\text{false}; - 更新父节点
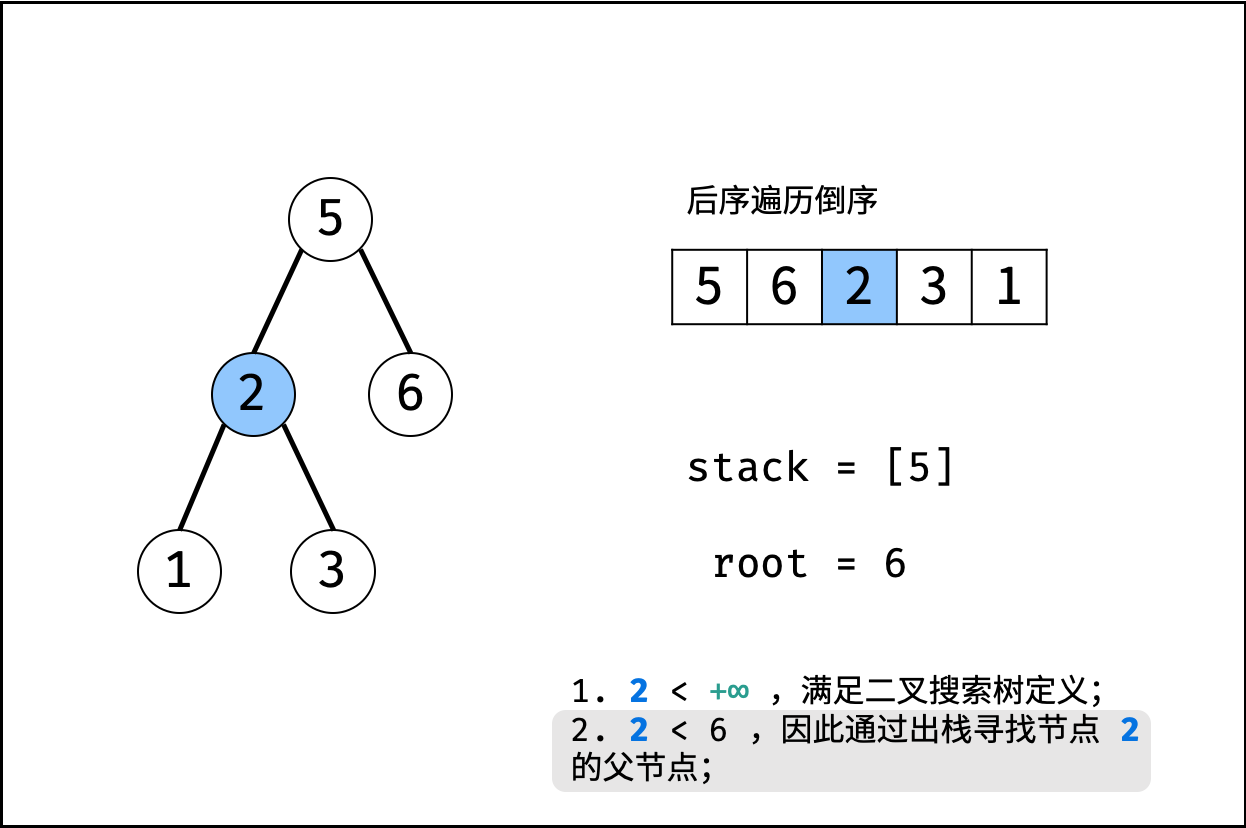
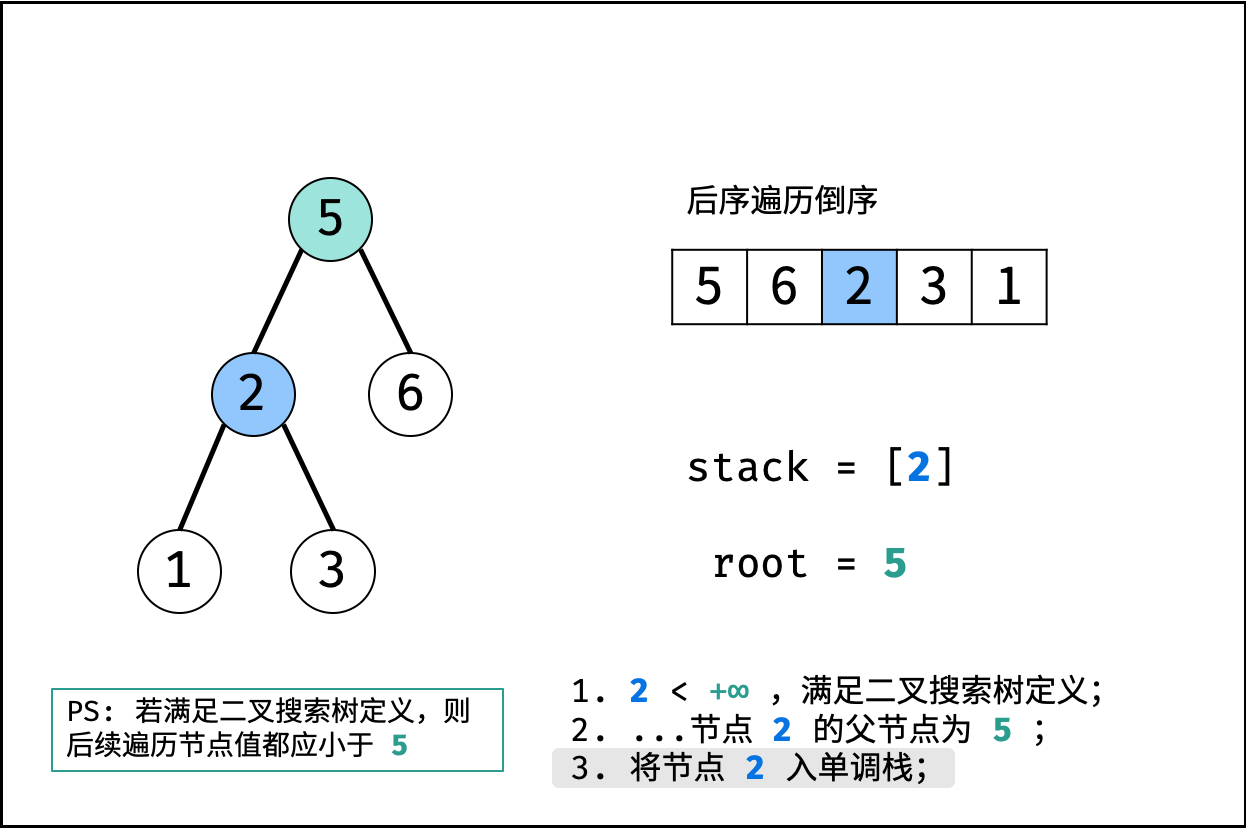
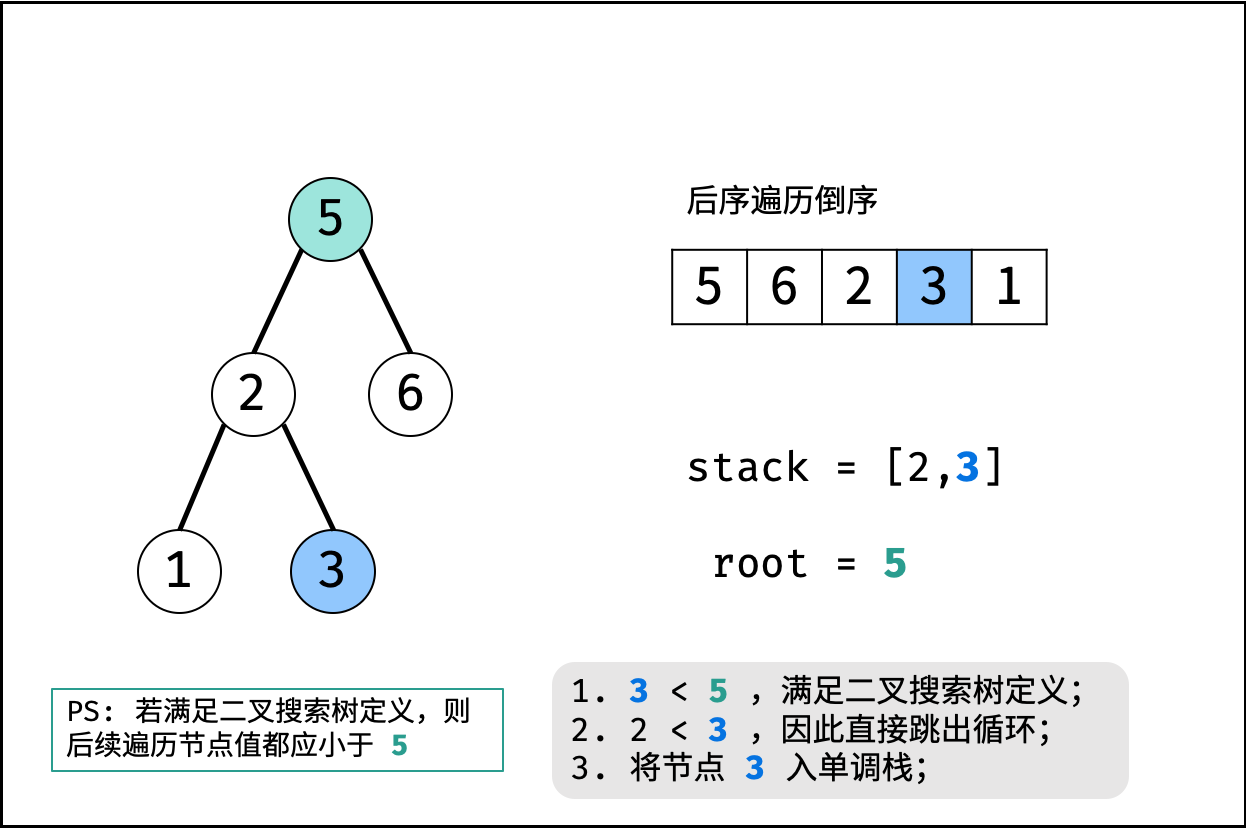
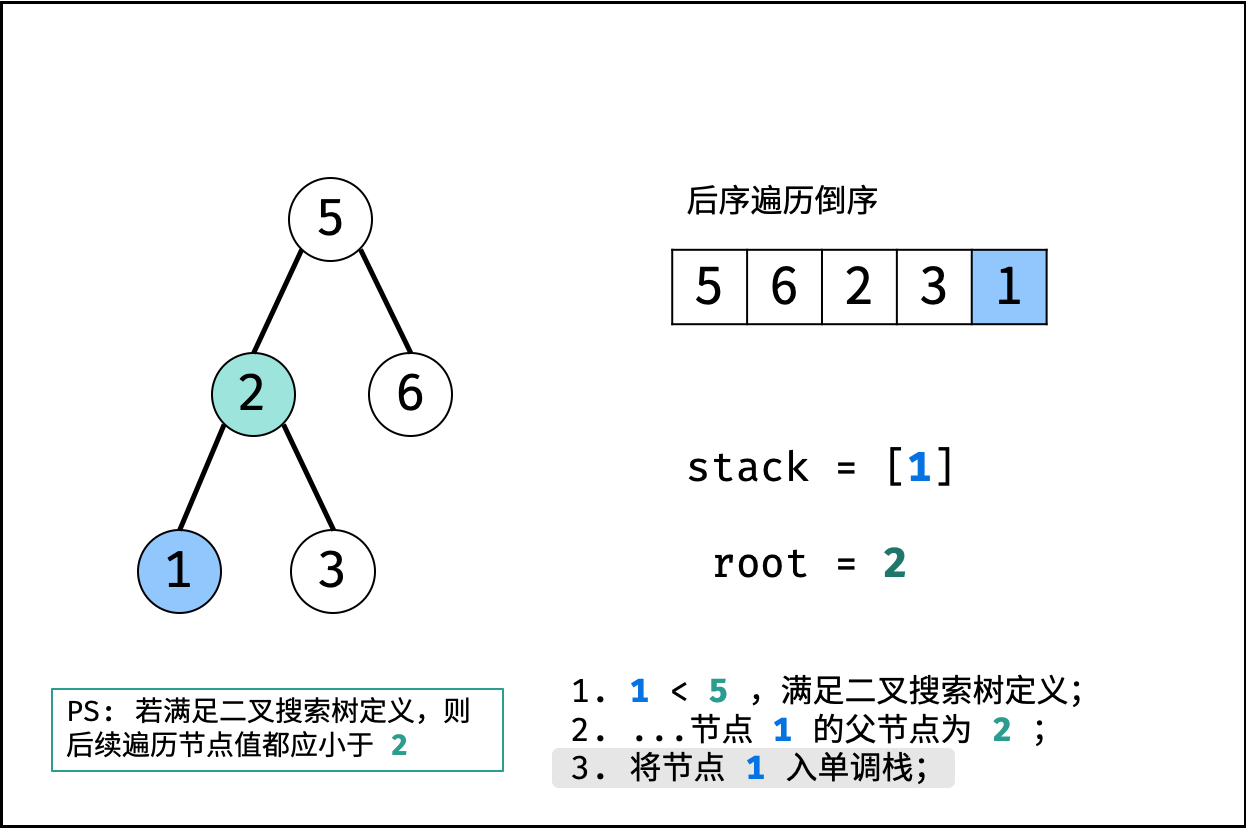
root: 当栈不为空 且r_i<stack.peek()时,循环执行出栈,并将出栈节点赋给root。 - 入栈: 将当前节点
r_i入栈;
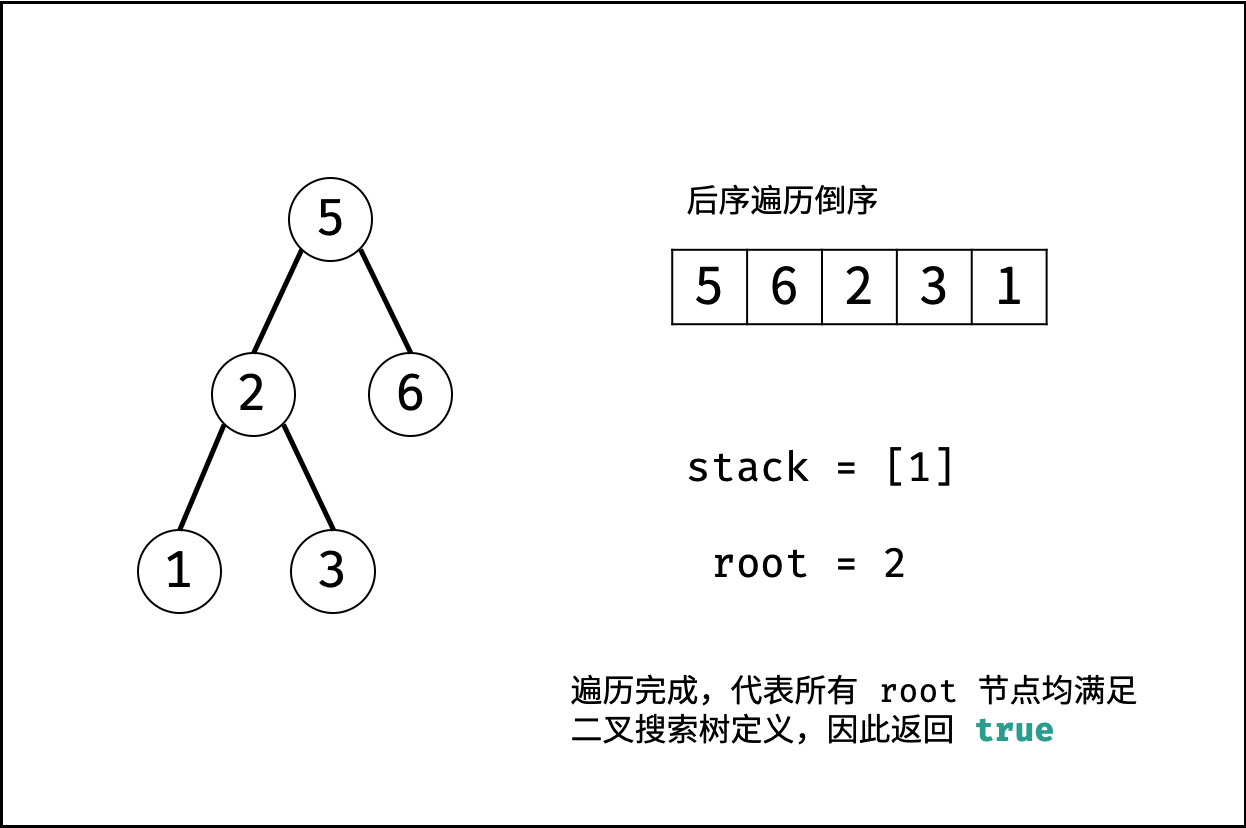
- 判断: 若
- 若遍历完成,则说明后序遍历满足二叉搜索树定义,返回
\text{true}。
< ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, >
>
代码:
class Solution:
def verifyTreeOrder(self, postorder: List[int]) -> bool:
stack, root = [], float("+inf")
for i in range(len(postorder) - 1, -1, -1):
if postorder[i] > root: return False
while(stack and postorder[i] < stack[-1]):
root = stack.pop()
stack.append(postorder[i])
return True
class Solution {
public boolean verifyTreeOrder(int[] postorder) {
Stack<Integer> stack = new Stack<>();
int root = Integer.MAX_VALUE;
for(int i = postorder.length - 1; i >= 0; i--) {
if(postorder[i] > root) return false;
while(!stack.isEmpty() && stack.peek() > postorder[i])
root = stack.pop();
stack.add(postorder[i]);
}
return true;
}
}
class Solution {
public:
bool verifyTreeOrder(vector<int>& postorder) {
stack<int> stk;
int root = INT_MAX;
for(int i = postorder.size() - 1; i >= 0; i--) {
if(postorder[i] > root) return false;
while(!stk.empty() && stk.top() > postorder[i]) {
root = stk.top();
stk.pop();
}
stk.push(postorder[i]);
}
return true;
}
};
复杂度分析:
- 时间复杂度
O(N): 遍历postorder所有节点,各节点均入栈 / 出栈一次,使用O(N)时间。 - 空间复杂度
O(N): 最差情况下,单调栈stack存储所有节点,使用O(N)额外空间。